當(dāng)前位置:首頁
> 科技博覽
> 人工智能
“巧手機器人”實現(xiàn)雙面抓握與自主爬行

復(fù)現(xiàn)并升級人類手部動作
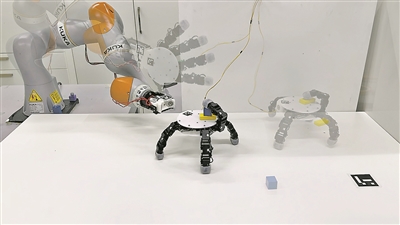
“巧手機器人”可從機械臂上分離,爬行拾取多個物體并重新與機械臂連接。
圖片來源:EPFL
科技日報北京1月20日電 (記者張夢然)據(jù)《自然·通訊》20日發(fā)表的研究,一種“巧手機器人”不但能夠復(fù)現(xiàn)人類手部的33種抓握動作,還升級成具備雙面抓握與自主爬行能力的“高級手”。這一由洛桑聯(lián)邦理工學(xué)院(EPFL)研發(fā)的可拆卸機械手,能抓取超出常規(guī)尺寸范圍的物體,并能連續(xù)處理多個目標(biāo),在工業(yè)自動化、服務(wù)協(xié)助及野外勘探等領(lǐng)域具有極大應(yīng)用價值。
在機器人學(xué)領(lǐng)域,機械手的設(shè)計長期受到人類手部結(jié)構(gòu)的啟發(fā)。盡管人手極為靈巧,但受到非對稱形態(tài)與單面抓握的物理局限,限制了其在狹窄空間作業(yè)、多物體同步操作等場景下的效能。為突破這些限制,工程師近年來不斷探索對稱結(jié)構(gòu)、模塊化及可重構(gòu)的機械手設(shè)計方案。
在這項工作中,團隊開發(fā)了兩種對稱結(jié)構(gòu)的機械手:五指版本與六指版本,手掌直徑均為16厘米。對稱設(shè)計使其能夠從雙面進行抓握,顯著增強了操作的靈活性與適應(yīng)性。該機械手的另一個突出特點是可與機械臂基座分離,通過內(nèi)置驅(qū)動實現(xiàn)自主爬行移動。
研究團隊演示了“巧手機器人”連續(xù)抓取最多3個不同物體的能力,并能在抓持物體的狀態(tài)下,穩(wěn)定地重新與機械臂對接。實驗顯示,該設(shè)備能夠可靠抓取多種日常物品,如卷筒芯、橡膠筆、罐頭與橡膠球,并能復(fù)現(xiàn)人類手部的數(shù)十種典型抓握姿態(tài),最大負載可達2公斤。
這類可脫離基座、具備移動能力的機械手,代表了一種向“機器人即服務(wù)”及柔性制造系統(tǒng)演進的技術(shù)方向。其可拆卸與重新配置的特性,為在復(fù)雜、非結(jié)構(gòu)化環(huán)境中執(zhí)行任務(wù)提供了新思路,例如在災(zāi)難救援中進入廢墟縫隙進行操作,或在倉儲物流中同時處理多個異形包裹。未來的研究可進一步探索其在動態(tài)環(huán)境中的自主決策與協(xié)同作業(yè)能力,推動機器人系統(tǒng)向更智能、更適應(yīng)多變場景的方向發(fā)展。
亚洲网址在线免费观看|
日韩熟女制服卡通人妻av|
亚洲无码成人福利视频|
在线亚洲精品一区二区不卡91|
人人看,人人插,人人射|
一区二区精品av在线|
人人妻人人澡人人爽人人在线观看|
新福利视频二区三区|
国产精品污污污网站入口|
日本 中出 中文字幕|
国产精品99 av|
天天爱天天日天天操天天干|
夜夜嗨蜜乳av一区二区|
奇米影视四色 亚洲|
亚洲熟妇色xxxxx欧美|
久久青草欧美日韩精品|
婷婷激情五月俺也去|
人妻中文字幕一区二区三|
出轨人妻少妇500视频|
天天色天天干天天好逼综合网
|
国产又粗又长又大又呻吟|
亚洲青青草原在线视频|
精品国产日韩一区三区|
成人av精品在线观看|
免费黄色在线免费观看|
日本aⅴ爽av久久久久久|
国产又粗又猛又爽免费视频|
天天干天天日天天扣|
91精品国产情侣高潮对白会所|
中文字幕福利视频在线观看|
久久国产精品一区二区久久|
亚洲天堂2018色|
草草久性色av综合av专区|
人妻久久久www999|
蜜桃亚洲一区二区三区|
91久久国产精品高潮|
久久夜色精品国产69|
台湾中文妹子网一区二区|
天天透天天狠天天日|
91污短视频在线观看
|
97人妻人人澡人人搡|
亚洲天堂2018中文字幕|
免费国产人做人视频在线观看|
免费日本伦理片在线观看|
中文字幕,久久爽一区|
区一区二视频在线观看|
missav中文字幕|
天天日天天摸天天操天天干|
这里只有99精品最新|
欧美亚洲国产精品中文字幕|
91精品国综合久久久蜜臀九色|
99久久免热在线观看|
亚洲精品视频在线观看你懂的|
性狠狠18禁久久久|
亚洲3dav三级在线观看|
国产富婆做全套视频高潮|
天天日天天色天天射天天色综合|
黑人女人性较视频免费视频|
国产夫妻精品视频久久久|
亚洲一卡2卡3卡4卡乱码|
亚洲乱熟女一区二区三区影片|
欧美激情三级线在线观看在线播放|
丰满美女BB白大男人操水多|
国产精品白丝久久久|
大鸡巴用力插麻豆视频|
天天干天天透天天操|
av网址在线免费看|
亚洲国产精品大秀在线播放|
在线亚洲精品一区二区不卡91|
欧美极品少妇高潮喷水|
国产美女福利小视频|
欧美日韩经典一区二区|
天天干天天要天天色|
住在隔壁欲求不满的丰满人妻|
青青青在线免费视频观看|
日日夜夜综合一区二区|
性狠狠18禁久久久|
欧美日本国产人妖综合视频|
182午夜tv在线观看|
精品日本视频一二三|
亚洲一区二区有码在线|
free美女女同性|
对白视频一区二区在线观看|
国产美女福利小视频|
老熟妇一区二区三区四区|
99国产精品9999|
变态调教一区二区三区男同|
亚洲国产激情精品在线观看
|
欧美亚洲国产在线观看|
日日干夜夜操狠狠干|
国产资源在线中文字幕|
亚洲午夜资源在线观看|
人妻一区视频在线观看|
亚洲va日韩va欧美va|
蜜桃亚洲一区二区三区|
偷拍区自拍区亚洲欧美|
天天干天天透天天操|
婷婷激情五月俺也去|
婷婷久久丁香中文字幕|
91普通话国产对白在线|
欧美亚洲另类网址在线|
日本视频一二三四五六七八十|
欧美丰满熟妇bbbbbb|
黄片 18禁大胸av一区二区|
日韩高清不卡视频在线观看|
亚洲天堂2018色|
亚洲视频在线观看精品视频|
国产偷拍自拍中文字幕|
女人把腿张开让男人捅在线看|
99久久在线观看视频|
国产精品污污污网站入口|
国产偷拍自拍中文字幕|
亚洲熟女乱色一区二区三区丝袜
|
堕落人妻之巧合av在线|
欧美黄页视频免费在线观看|
亚洲成人一区二区在线观看下载|
超碰在线夫妻自拍51|
国产成人精品午夜福利在线观看|
免费中文字幕第一页在线观看|
桃色成人国产av在线电影|
五月天开心激情视频|
亚洲永久精品一区二区三区|
日本韩国三级伦理片|
国产女主播福利在线观看|
av 在线 人妻 中文|
av天堂亚洲美女网|
九色亚洲一区二区三区|
免费国产人做人视频在线观看|
国产资源在线中文字幕|
国产在线午夜一区二区|
欧美美女免费在线视频|
日日干夜夜操狠狠干|
日本丰满肉感bbw|
亚洲春色 偷拍自拍|
国产剧情v 在线精品|
人妻少妇偷人精品久久视频|
日本黄色三级免费网址|
人妻诱惑久久中文字幕在线视频|
超碰97人人大香蕉|
国产夫妻在线观看视频|
人妻少妇偷人精品久久视频|
自拍偷拍色亚洲欧美色|
伊人久久大香线蕉av综合|
亚洲天堂2018色|
国内精品久久久久精品爽爽|
97在线视频在线观看|
美女张开腿让男人桶到底|
欧美一卡视频在线观看|
亚洲国产一区二区精品古代|
午夜免费激情福利a|
国产91刺激对白在线播放|
青青草原av免费在线观看|
在线观看69式视频|
精品在线视频播放你懂的|
亚洲3dav三级在线观看|
国产精品视频在线麻豆|
日本一级特黄aaaaa片口|
日本黄色三级免费网址|
我想看最真实最刺激的大鸡巴日逼|
九九久久只有这里有精品|
在线精品免费观看一区三区|
无码精品一区二区三区488|
亚洲网址在线免费观看|
成人区人妻精品一区二区网站|
欧美午夜精品久久久久久免费|
嗯嗯嗯嗯啊啊啊啊啊在线观看|
激情av成人偷拍网站|
风骚少妇高潮喷水理伦片|
天天摸天天舔天天操天天日|
ysl蜜桃色6696|
少妇被粗大的猛烈进出动视频
|
91色婷婷在线视频免费观看|
欧洲av亚洲av综合|
瑟瑟视频免费网站在线|
激情五月婷婷亚洲综合|
中文字幕av第一页在线|
青青免费操在线视频观看|
啪啪啪小视频免费网站|
汤唯梁朝伟激情无删减在线|
91精品国产91久久综合桃花|
欧美1区2区3区4区|
99re在线免费播放|
99久久在线观看视频|
欧美人成视频在线视频|
91桃色一区二区亚洲熟|
婷婷激情五月俺也去|
人人妻人人澡人人爽人人老司机|
亚洲青青草原在线视频|
亚洲av电影免费看|
欧美v亚洲v日韩午夜久久久|
亚洲一区二区有码在线|
洲色熟女图激情另类图区|
性生活视频免费观看久久|
天天射天天干天天透综合网|
天天日天天摸天天操天天干|
japan老熟妇老熟女|
人妻中文字幕一区二区三|
亚洲自拍偷拍视频区|
国产 精品 自拍 视频|
亚洲天堂2018中文字幕|
亚洲人成电影网站 久久影视|
国产精品视频一区在线观看|
交换人妻2在线观看|
中文字幕一区一二三区四区五区人
|
av二区免费在线观看|
av日本女优在线观看|
五月天欧美激情视频免费观看
|
新男人的天堂在线观看|
国产精品高清在线免费观看|
最新网址 日韩精品|
新福利视频二区三区|
182tv视频在线|
男人把女人操出白浆视频|
91精品国产自产在线观看,|
91九色国产丰满老熟女|
婷婷激情五月俺也去|
中文字幕无码免费久久99|
免费看瑟瑟视频的软件|
亚洲天堂中文在线播放|
男人天堂社区一区二区|
国产午夜在线视频观看麻豆|
亚洲精品综合激情久久|
黄片 18禁大胸av一区二区|
免费av 自拍偷拍|
日本韩国三级伦理片|
337p欧美日本大胆精品色噜噜|
三级日本理论在线观看|
少妇被粗大的猛烈进出动视频
|
av网页一区二区三区|
国产偷拍自拍中文字幕|
精品精品精品精品精品污污污污|
日本一级特黄aaaaa片口|
中国亚洲免费在线观看|
99久久久99久久91熟女|
天天热天天操天天干|
住在隔壁欲求不满的丰满人妻|
中文字幕 日韩精品 在线|
成人国产亚洲av在线|
一区二区三区国产成人久久|
亚洲人成电影网站 久久影视|
中文字幕小综合 97视频|
操操操在线免费观看|
国产又粗又黄又猛视频|
亚洲美女屁股眼交4|
国产精品视频一区在线观看|
国产高清视频在线观看97|
免费av 自拍偷拍|
chinese熟女高潮喷水|
亚洲人成电影网站 久久影视|
亚洲欧美久久一区二区三区|
欧美人与性动交a欧美精品|
亚洲激情 另类图片|
免费欧美老年人性生活|
japan女同女女日韩|
国产精品亚洲美女视频|
外国人眼中的亚洲美女|
大胆少妇高潮毛片免费看|
精品国产一区二区三区无码孕妇|
人妻人妻videos人|
青青草小视频在线播放|
91大神视频哪里能看|
欧美福利片视频在线观看|
成人区人妻精品一区二区网站|
五十路熟女俱乐部hd|
久久精品熟女亚洲av麻|
免费在线观看高清视频|
国产白丝18禁久久久久久|
国产精品98在线观看|
囯产伦精品一区二区三区视频|
日韩精品人妻久久久一区|
精品四川乱子伦视频国产|
成人av天堂中文在线|
中文亚洲爆乳无码专区转码|
国产AⅤ无码片毛片一级|
国产精品综合系列av|
天天插天天射天天色网站|
天堂成人免费在线播放视频|
啪啪啪亚洲丝袜诱惑天堂av
|
182tv视频在线|
看全色黄大色黄女片18女人|
中文在线天堂中文在线|
青娱乐午夜福利在线观看视频|
欧美激情三级线在线观看在线播放|
久久国产精品一区二区久久|
91桃色一区二区亚洲熟|
天天爽天天狠综合久久久综合|
视频一区视频二区亚洲|
91人妻丰满熟妇aⅴ无|
日韩精品人妻久久久一区|
2019av中文字幕|
可以免费在线观看av的软件|
精品熟妇一期二区三期|
东京热加勒比欧美日韩|
男人天堂社区一区二区|
亚洲va欧美va人人爽夜夜嗨|
一区二区三区精品无|
黄片高清男人的天堂|
女孩要大鸡巴干免费短视频|
亚洲春色 偷拍自拍|
337p欧美日本大胆精品色噜噜|
国产一区日韩一区日韩|
中国男人的天堂天堂网|
欧美高清视频一二三区|
丰满的女人露逼被操露逼的视频|
在线亚洲男人的天堂|
free美女女同性|
1204人妻一区二区三区|
懂色精品欧美日韩懂色a|
ppvod在线视频|
亚洲欧美国产日韩字幕|
天天日天天色天天射天天色综合|
视频一区视频二区亚洲
|
国精品人妻一区二区三区电影|
1级黄色片在线观看|
久久久久久久久久久久久久久蜜桃|
日日夜夜精品在线观看|
香港午夜一级大片在线播放|
91精品人人妻人人做人人爽|
欧美精产国品一二三产品测评|
婷婷伊人综合中文字幕小|
亚洲精品伦理熟女国产一区二区|
免费中文字幕第一页在线观看|
变态另类国产亚洲综合|
欧美在线观看黄页网址|
国模GoGo无码人体啪啪|
99精品视频在线在线观看视频|
91在线播放手机视频|
欧美伦理在线一区二区三区|
亚洲人成电影网站 久久影视|
瑟瑟鲁视频在线观看|
182tv视频在线|
成人30分钟毛片免费|
青青免费操在线视频观看|
亚洲卡一卡二卡三在线|
亚洲熟女乱色一区二区三区丝袜|
鲁大师在线观看视频免费高清版|
人妻人妻videos人|
变态调教一区二区三区男同|
中文字幕熟女久久av|
久久久久有精品国产白浆|
伊人久久大香线蕉av综合|
蜜桃亚洲一区二区三区|
日本不卡免费中文字幕|
337p欧美日本大胆精品色噜噜|
日本aaaaa级大片|
国产精品大片在线观看|
中文字幕无码免费久久99|
香蕉老师一区二区三区|
奇米影视四色 亚洲|
成人免费动漫网站入口|
91麻豆精品国产自产在线91|
亚洲永久精品一区二区三区|
中文字幕av第一页在线|
超碰97在线视频观看|
特级黄色搞逼的亚洲的|
超碰97在线视频观看|
日本a级片视色网站|
九色亚洲一区二区三区|
亚洲成a人7777在线播放|
女人把腿张开让男人捅在线看|
九色精品国产一区二区|
天天操天天摸天天草|
亚洲天堂2018色|
高清av在线中文字幕|
国产夫妻在线观看视频|
香蕉为什么要叫香蕉|
久久午夜偷拍免费视频|
动漫精品福利视频在线观看|
桃子网视频网站在线观看|
国产福利社区一区二区|
一区二区三区熟女人妻|
日日操夜夜爽天天干|
用我的大鸡巴操熟女大浪逼|
丰满诱人的少妇3伦理|
国产精品蜜桃一区二区三区|
人妻久久久www999|
欧美人与动一级完整视频|
日本club女同性恋视频网|
黄色免费电影网站东京热|
久久午夜偷拍免费视频|
美女张腿让男人捅爽|
国产avvs日产av|
可以免费在线观看av的软件|
9191色在色在线播放|
国产精品亚洲美女视频|
日日夜夜精品视频看看|
久久国产精品一区二区久久|
青娱乐在线分类视频|
和农村大屁股熟妇的艳遇|
av亚洲情色在线观看|
国产成人在线视频网站|
日本久久久久久人妻|
7777777亚洲成a人片|
女人扒开的小泬高潮免费视频|
熟女高潮一区二区三区在线视频
|
ysl蜜桃色6696|
日韩人妻电影一区二区|
住在隔壁欲求不满的丰满人妻|
精品国产二区三区四区|
国产精品系列在线播放|
88久久免费中文字幕|
国产无遮挡又爽又刺激又激情|
牛牛精品大机巴男人日B片|
人妻丝袜诱惑久久精品免费视频|
日韩中文字幕在线播放视频|
日本免费最新不卡视频|
国产裸体免费无遮挡大尺度视频|
九七超碰人人干人人爽|
日韩精品中文字幕欧美激情|
国产av巨作路边搭讪美女|
无码精品一区二区三区488|
日本直接看不卡的视频在线
|
91免费在线免费观看|
91精品国产91久久综合桃花|
欧美三个人性极品另类|
182午夜tv在线观看|
天天色天天日天天色|
91在线播放手机视频|
亚洲尺码和欧洲尺码av|
亚洲激情五月一区二区三区|
欧美午夜精品久久久久久免费|
韩国一级片一区二区三区|
邻居中文字幕在线观看|
亚洲h色有声小说在线收听网|
精品国产一区二区三区无码孕妇
|
变态另类国产亚洲综合|
瑟瑟爱成人免费在线|
日韩人妻电影一区二区|
日日操夜夜爽天天干|
日本 中出 中文字幕|
久久中文字幕日韩精品|
区一区二视频在线观看|
69堂国产成人精品视频免费|
超碰在线播放福利91|
精品日本视频一二三|
国产99精品一区二区三区四区|
免费看视频高清无码|
av网址在线免费看|
9191色在色在线播放|
在线观看69式视频|
av网页一区二区三区|
少妇无码一区二区三区四区|
久碰人妻人妻人妻人妻人调教女王|
精品视频在线观看免费三区|
va视频 中文字幕|
黄色免费电影网站东京热|
亚洲手机在线免费视频观看|
久久久久99精品成人免费|
9色熟女露脸九色自拍视频|
欧洲美女b毛裸体日韩影院|
爱的久久999精品久久久久久|
亚洲乱熟女一区二区三区影片|
大香蕉一条大香蕉 下一句|
精品女同一区二区免费站|
不卡中文字幕在线视频|
免费女同在线一区二区|
人妻人妻videos人|
欧美成人激情一区二区|
欧美性猛交XXXXX按摩欧美|
日本黄色三级免费网址|
jdav简单av在线播放|
99久久婷婷国产综合亚洲|
91小视频在线免费看|
yellow在线亚洲精品一区|
欧美一卡二卡色一区二区|
国产a∨熟女精品一区二区三区|
韩国av一区二区在线观看|
秋霞电影网理论片久久|
天天草天天干天天插|
经典三级韩国久久久丝袜|
在线免费观看日b视频|
精品区一区二在线观看|
这里只有国产精品视频|
国产美女丝袜诱惑一区|
交换人妻2在线观看|
成人30分钟毛片免费|
韩国女主播青草直播视频|
青春草97在线视频|
深夜在线看福利视频|
特级黄绝片一级黄色片|
综合激情久久综合久久|
jdav简单av在线播放|
人妻中文字幕一区二区三|
久久综合久久综合鬼色|
爱的久久999精品久久久久久|
三级日本理论在线观看|
国产黄色免费精品网站|
天天干天天操天天在|
日本 中出 中文字幕|
人妻换人妻a毛片人妻换人妻|
少妇一区二区三区观看网站|
国产资源在线中文字幕|
99热只有这里是精品|
91在线手机视频播放|
青春草97在线视频|
91亚洲国产亚洲国产亚洲|
国产精品高潮呻吟av蜜臀|
亚洲精品成人在线观看av|
东京热加勒比欧美日韩|
堕落人妻之巧合av在线|
国产福利资源在线视频|
99久久在线观看视频|
青青草小视频在线播放|
freesex高清日本|
久久99精品久久久久久国产水牛
|
精品一区精品二区免费|
日本一二三区不卡高清|
亚洲青青草原在线视频|
国产精品视频对白刺激|
色播五月亚洲综合网|
亚洲青青草原在线视频|
欧美1区2区3区4区|
草草久性色av综合av专区|
日本六十路熟妇图片|
亚洲欧美偷拍综合图片|
亚洲欧洲自拍偷拍av|
人妻一区二区中文字幕91|
亚洲影音av资源在线观看|
毛片xxxxx久久久|
色七七久久桃花综合色|
亚洲黄色天堂网站在线观看禁18
|
桃子网视频网站在线观看|
av 在线 人妻 中文|
欧美男男激情freegay视频|
久久中文高清字幕网|
国产不卡av一区二区在线观看|
91又粗又长又大又爽又猛|
午夜精品福利久久一区|
99分女朋友电视剧在线观看|
曰本成人中文字幕在线视频|
成人av精品在线观看|
久久免费少妇高潮a特黄|
天天色天天干天天好逼综合网
|
亚洲精品综合激情久久|
掰开人妻腿射满精液|
乱人伦××××国语对白|
日韩熟女制服卡通人妻av|
青青青青青久免费观看|
99国产精品视频露脸对白|
久久国产精品一区二区久久|
我爱熟女视频一区二区三区|
亚洲av黄色在线免费观看|
一区二区在线观看视频网站|
国产老鸭窝在线观看|
青青草原 华人在线|
色哟哟播放器视频在线观看免费|
大型黄色av网站在线播放|
亚洲成人精品h在线观看|
出轨的女人操逼视频免费看|
在线免费观看三上悠亚av|
中文亚洲爆乳无码专区转码|
夜夜躁爽日日躁狠狠躁av|
99久久久99久久91熟女|
男人操美女的小骚逼|
久久中文字幕2015|
天天爱天天日天天操天天干|
久久中文高清字幕网|
国产剧情v 在线精品|
日本直接看不卡的视频在线|
嫩模大尺度偷拍在线视频|
亚洲v欧洲va国产va|
激情综合色综合久久久久久|
欧美人与性动交a欧美精品|
国产三级视频在线观看视频|
a女人毛片一区二区三区|
国模GoGo无码人体啪啪|
7x7x7x成人免费|
中国日韩欧美一级片|
一级日韩一级欧美片|
青青草原 华人在线|
日韩精品成人影院在线观看|
蜜桃亚洲一区二区三区|
成人黄色一级av大片在线观看|
天天插天天射天天色网站|
我想看最真实最刺激的大鸡巴日逼|
性感美女在线色视频|
亚洲专区+欧美专区+自拍|
7777久久亚洲中文字幕密|
日韩中文字幕在线播放视频|
91全网最全资源在线观看|
变态另类国产亚洲综合|
av网页一区二区三区|
中文字幕av日韩在线`|
卡一卡二卡三国产精品|
超碰在线夫妻自拍51|
岛国精品一区二区中文字幕|
日日夜夜综合一区二区
|
国产又色又爽又粗又硬|
欧美一区二区无卡免费|
日韩亚洲中文欧美在线|
中文字幕av日韩在线`|
国产精品xxxx国产喷水|
欧美成人激情一区二区|
亚洲麻豆av免费在线|
与上司出轨的人妻电影在线|
一区二区三区精品无|
2019av中文字幕|
亚洲AV无码sm变态另类专区|
中文字幕福利视频在线观看|
天天干天天操天天在|
香港午夜一级大片在线播放|
日本视频一二三四五六七八十|
久久久久久av电影av|
男人天堂社区一区二区|
美女被草在线观看免费|
亚洲国产一区在线播放视频|
熟女高潮一区二区三区在线视频|
日本 中出 中文字幕|
欧美人与禽zozo性伦|
精品四川乱子伦视频国产|
九色91露脸半推半就熟女|
看欧美日韩黄色小视频
|
亚洲成a人在免费观看|
对白视频一区二区在线观看|
99热在线视频观看免费|
性色av一二三区免费|
japan老熟妇老熟女|
亚洲一区二区三区中文|
大伊香蕉在线精品视频人碰人|
亚洲综合欧美一区二区|
色就是色欧美setu|
亚洲尺码和欧洲尺码av|
国产成人高清精品亚洲一区二区|
91在线播放手机视频|
国产精品视频网站在线观看|
一区二区精品av在线|
亚洲影音av资源在线观看|
日本黄色十八禁视频播放器|
大香蕉一条大香蕉 下一句|
一区二区三区午夜探花|
美女被草在线观看免费|
熟女老阿姨中文字幕av|
日韩亚洲中文欧美在线|
7777777亚洲成a人片|
深夜在线看福利视频|
亚洲码欧洲码一区二区三区四区|
色在线视频在线观看|
中文字幕+乱码+中文字幕黄片|
精品国产第一区二区三区日韩|
在线视频聊天你懂得|
国产不卡av在线免费观看|
亚洲日产精品一二三|
国产精品情侣高潮呻吟|
亚洲黄色小视频国模私拍|
欧美黄页视频免费在线观看|
老熟女一区二区三区四区在线视频|
亚洲综合国产中文色婷婷|
天天做天天摸天天爽|
天天舔天天日天天干天天操天天射
|
亚洲avav在线天堂|
黄色av美女免费网站|
亚洲熟女一区二区二区|
亚洲码欧洲码一区二区三区四区|
欧美经典精品一区二区|
欧美国产亚洲欧美国产|
精品国产一区二区三区无码孕妇|
看女人大BB群伦交|
国产av大片亚洲一区二区|
亚洲黄色免费观看视频|
成人一区成人二区成人三区|
鲁大师在线观看视频免费高清版|
国产女主播福利在线观看|
日日噜噜夜夜躁躁狠狠|
欧美美女免费在线视频|
超级极品国产精品剧情av|
欧美视频一区二区在线观看|
动漫精品福利视频在线观看|
亚洲综合欧美一区二区|
成人av精品在线观看|
欧美午夜精品久久久久久免费|
超碰97在线免费观看了|
亚洲卡一卡二卡三在线|
啊啊啊啊啊好大好硬水好多视频|
中国日韩欧美一级片|
一区二区精品av在线|
在线观看免费日本av|
国产成年人在线观看网站|
91精品国产情侣高潮对白会所|
日本免费最新不卡视频|
久久综合97色综合网|
欧美日韩经典一区二区|
视频在线免费观看一区|
青青草原 华人在线|
中国日韩欧美一级片|
黄色蜜桃av黄色在线|
av 在线 人妻 中文|
美女视频在线欧美日韩|
人妻之和服诱惑在线|
在线观看日韩完整版高清|
女孩要大鸡巴干免费短视频|
亚洲国产日韩欧美一区二区三区,|
99奇米a在线观看视频|
欧美丰满熟妇bbbbbb|
黄色aa网站在线观看|
亚洲国产精品自产拍在线观看|
欧美三个人性极品另类|
日本午夜福利免费在线播放|
亚洲精品乱码久久久久的用户评价
|
欧美性生活黄色图片|
欧美激情三级线在线观看在线播放|
国产专区中文字幕在线|
九七超碰人人干人人爽|
人人看,人人插,人人射|
黄色91免费一区二区|
苍井空大战黑人一小时|
韩国一级片一区二区三区|
超碰在线97免费观看|
日本a级片视色网站|
欧美老熟女老熟妇极品|
久久久有码一区二区三区|
darlacrane熟女俱乐部|
天天草天天干天天插|
7x7x7x成人免费|
99精品人人做人人爽|
亚洲av夏目彩春jux956|
91桃色一区二区亚洲熟|
中文字幕在线播放日韩av|
老熟女在线视频第三区|
国产精品高潮呻吟av在线观看|
精品国产第一区二区三区日韩|
黄片高清男人的天堂|
五月天久久激情四射|
经典三级韩国久久久丝袜|
亚洲码欧洲码一区二区三区四区|
在线亚洲精品一区二区不卡91|
国产在线精品一区二区动漫|
成人动漫精品一区三区|
免费欧美人妻视频在线|
天天热天天操天天干|
91久久久久无码精品国产孕妇
|
免费黄在线观看网站|
出轨人妻少妇500视频|
丰满诱人的少妇3伦理|
毛片xxxxx久久久|
少妇被粗大的猛烈进出动视频|
韩国三级日本三级国产三级|
barazza熟女俱乐部|
亚洲高清资源在线观看|
男人电影天堂在线观看|
啪啪啪在线观看网址|
在线观看日韩完整版高清|
国产亚洲天堂久久一区精品|
精品视频久久久精品|
北条麻妃av在线看|
日日干夜夜操狠狠干|
日本五十岁熟女性视频|
欧美人与动一级完整视频|
国产情侣自拍一区视频|
青春草97在线视频|
石原莉奈一区二区无码青涩|
日韩色系视频免费观看|
久久久久精品无码AV专区|
香港午夜一级大片在线播放|
91久久国产精品高潮|
欧美国产亚洲欧美国产|
中文字幕福利视频在线观看|
国产一级黄色大片在线|
在线亚洲精品一区二区不卡91|
变态调教一区二区三区男同|
国产精品综合系列av|
青青草国产在线视频观看|
欧美整片一区二区三区|
综合性久久久久久久久久久
|
噜噜人妻少妇精品一区二区三区|
少妇极品熟妇人妻无码APP|
亚洲国产一区在线播放视频|
国产精品综合系列av|
国产精品情侣高潮呻吟|
青青草国产av电影|
亚洲h色有声小说在线收听网|
免费观看在线播放视频一区二区|
青青青在线免费视频观看|
韩国民间高潮内射播放|
五十路视频在线观看|
大型黄色av网站在线播放|
天天摸天天舔天天操天天日|
瑟瑟视频免费网站在线|
a级大片视频免费看|
大鸡巴操出淫水视频|
国产91刺激对白在线播放|
中文字幕av熟女系列|
在线观看一区二区国产|
久久久亚洲国产天美传媒修理工|
不卡不卡一区二区三区|
中文字幕,久久爽一区|
91色婷婷在线视频免费观看|
日本aⅴ爽av久久久久久|
国产成人亚洲情趣丝袜888|
强奷漂亮少妇高潮在线观看|
chinese熟女高潮喷水
|
黄色免费电影网站东京热|
婷婷激情五月俺也去|
亚洲中文字幕2区8页|
青娱乐午夜福利在线观看视频|
日本少女漫画之不知火舞|
欧美一级 欧美三级|
日韩中文字幕高清免费|
乱人伦××××国语对白|
日韩在线电影一区二区三区|
亚洲不卡一区二区高清|
我爱熟女视频一区二区三区|
东京热heyzo一区|
久久综合97色综合网|
日本午夜一级成人片|
色播五月亚洲综合网|
最新免费国产电影电视剧在线播放|
美女的天堂av在线|
蜜桃红桃视频在线观看|
黄色av资源在线观看|
日本限制级三级电影|
国产美女福利小视频|
全国男人最大的天堂网|
亚洲熟女一区二区二区|
又大又爽又粗在床上app|
手机av中文字幕在线|
特级黄绝片一级黄色片|
欧美一卡二卡色一区二区|
婷婷久久丁香中文字幕|
苍井空大战黑人一小时|
自拍偷拍色亚洲欧美色|
韩国一级片一区二区三区|
欧美顶级aaaaaa|
国产又粗又猛又爽免费视频|
国产高清国内精品福利|
日韩熟女制服卡通人妻av|
牛牛精品大机巴男人日B片|
91大神夯51部在线观看|
国产又粗又猛又爽免费视频|
国产又粗又黄又猛视频|
天天舔天天日天天干天天操天天射|
牛牛精品大机巴男人日B片|
日本aaaaa级大片|
成人性生交大片免费看中文带字幕|
久久99亚洲一区二区|
亚洲国产精品久久久天堂不卡|
性感美女黄色刺激视频|
在线观看自拍视频国产|
国产精品高清在线免费观看|
av 在线 人妻 中文|
日本午夜福利免费在线播放|
年轻夫妻免费伦理夫妻性生活|
在线观看免费日本av|
亚洲国产激情精品在线观看|
中文字幕,久久爽一区|
182午夜tv在线观看|
超碰97人人大香蕉|
中文字幕一区二区三区四区区|
1204人妻一区二区三区|
偷拍区自拍区亚洲欧美|
亚洲情色,中文字幕|
午夜激情大尺度在线|
狠狠色综合久久婷婷色天使|
亚洲av成人天堂在线|
丰满诱人的少妇3伦理|
国产老妇一区二区三区熟女
|
男生进入女生身体插插的午夜永久|
日本少女漫画之不知火舞|
现代日本美人画全集|
最新中文字幕av一区|
自拍偷拍色亚洲欧美色|
a国精品午夜在线观看小视频
|
99精品丰满人妻一区二区|
在线观看视频探花精品婷婷|
91九色老熟女视频蝌蚪|
欧美极品少妇高潮喷水|
91亚洲国产亚洲国产亚洲|
亚洲国产精品大秀在线播放|
中文字幕,久久爽一区|
美女张腿让男人捅爽|
亚洲国产一区在线播放视频|
7x7x7x成人免费|
天天操天天操天天操天天操夜夜操|
天天舔天天日天天干天天操天天射|
一级日韩一级欧美片|
99国产精品视频免费观看一公|
天天干天天要天天色|
91污短视频在线观看|
久久久久久久久久久中文精品
|
激情视频大鸡巴操小逼高潮喷水|
91精品国产高清久久久久久lo|
在线视频 欧美 日本|
韩日三级中文字幕的|
亚洲无码成人福利视频|
超碰在线97免费观看|
天天操天天射天天靠|
欧美在线观看黄页网址|
少妇极品熟妇人妻无码APP|
1204人妻一区二区三区|
国产91刺激对白在线播放|
中文字幕日本人妻在线|
女人的鸡巴豆豆视频|
青青草原 华人在线|
久久免费少妇高潮a特黄|
美女张开腿让男人桶到底|
亚洲国产精品久久久天堂不卡|
天天色天天干天天好逼综合网|
97超碰中文字幕在线|
亚洲精品视频在线观看你懂的|
中文字幕日韩人妻在线天堂|
亚洲成人精品h在线观看|
最新中文字幕av一区|
国产亚洲天堂久久一区精品|
天天操天天射天天靠|
又大又爽又粗又黄少妇毛片|
一二三区日本亚洲视频|
ppvod在线视频|
天天热天天操天天干|
精品一区二区三区四区99
|
99久久婷婷国产综合亚洲|
秋霞电影网理论片久久|
久久久有码一区二区三区|
国产剧情视频在线观看|
伊人狠狠综合网入口|
亚洲欧美久久一区二区三区|
国产色主播福利在线观看|
青青青青青久免费观看|
囯产伦精品一区二区三区视频|
欧美一区二区无卡免费|
国产精品亚洲成在线97|
老熟女一区二区三区四区在线视频
|
香港午夜一级大片在线播放|
免费欧美人妻视频在线|
欧美成人小视频在线|
欧美在线日韩a精品久|
人妻丝袜诱惑久久精品免费视频
|
公开免费在线视频播放|
国产在线视频网站你懂得
|
九九久久只有这里有精品|
免费看视频高清无码|
大香蕉www大香蕉|
国产不卡av在线免费观看|
欧美色噜噜噜视频在线
|
青青久热免费精品视频2|
嫩模大尺度偷拍在线视频|
亚洲国产一区二区精品古代|
中文字幕日本人妻在线|
噜噜噜噜噜久久久久久91|
免费在线播放不卡av|
欧美丰满熟妇bbbbbb|
男女之间涩涩的视频|
国产一级片久久免费看同|
欧美经典精品一区二区|
国产美女啪啪啪啪啪啪|
2021国产精品视频|
999久久久久久精品久久|
亚洲手机在线免费视频观看|
最新中文字幕av一区|
在线看的免费网站黄页|
av 在线 人妻 中文|
av日本女优在线观看|
国产午夜精品亚洲精品国产|
强奷漂亮少妇高潮在线观看|
精品区一区二在线观看|
成人国产综合视频在线观看一区|
操操操在线免费观看|
亚洲尺码和欧洲尺码av|
我要看黄色片子一级片子|
日日摸夜夜精品一区|
亚洲av电影免费看|
久久久久久av电影av|
91粉色国产福利在线观看|
和农村大屁股熟妇的艳遇|
久久精品天堂一区二区|
狠狠色综合久久婷婷色天使|
狠狠躁夜夜躁人爽碰88%|
欧美v亚洲v日韩午夜久久久|
美女的天堂av在线|
亚洲成人精品h在线观看|
操操操操操操操操操操操操操日日
|
熟妇人妻精品一区二区三区|
国产av大片亚洲一区二区|
我想看大鸡吧操女人的小湿逼|
久久久久99精品成人免费|
国产女主播福利在线观看|
亚洲成a人7777在线播放|
人妻久久久www999|
日本六十路熟妇图片|
chinese国产高清av|
国产综合色在线视频区|
69国产成人精品电影|
鸡巴双插美女在线视频|
石原莉奈一区二区无码青涩|
欧美一级 欧美三级|
人妻丝袜诱惑久久精品免费视频
|
亚洲3dav三级在线观看|
怡红院精彩视频在线观看|
日本午夜福利免费在线播放|
色播五月亚洲综合网|
在线免费观看三上悠亚av|
欧美视频精品免费观看|
7777777亚洲成a人片|
欧美诱惑人妻另类综合|
一区二区三区熟女人妻|
在线视频聊天你懂得|
日韩精品人妻久久久一区|
韩国三级日本三级国产三级|
韩国三级日本三级国产三级|
欧美福利片视频在线观看|
瑟瑟视频免费网站在线|
激情综合五月天一区二区|
成年人亚洲黄色av天堂|
国产黄色免费精品网站|
精品区一区二在线观看|
欧美成人激情一区二区|
xxx欧美插爽多人视频|
操操操操操操操操操操操操操日日|
久久久久久久久久婷婷婷婷婷婷|
久久六月激情中文字幕|
免费中文字幕第一页在线观看|
国产亚洲天堂久久一区精品|
公开免费在线视频播放|
2019av中文字幕|
人人妻人人澡人人爽人人在线观看|
中文字幕在线精品视频站|
黄色aa网站在线观看|
亚洲尺码和欧洲尺码av|
中文在线天堂中文在线|
亚洲高清资源在线观看|
超碰在线97免费观看|
香港午夜一级大片在线播放|
欧美经典精品一区二区|
啪啪网国产精品视频|
综合性久久久久久久久久久
|
c美女福利r18视频在线观看|
天天操天天射天天靠|
日韩中文字幕超碰免费电影|
汤唯梁朝伟激情无删减在线|
japan老熟妇老熟女|
天堂av在线大香蕉观看|
darlacrane熟女俱乐部|
超碰在线免费97观看|
国产精品jizz在线观看|
99精品视频在线在线观看视频|
色老头国产av一区二区三区|
欧美人成视频在线视频|
动漫精品福利视频在线观看|
天天射天天舔天天摸|
欧美亚洲国产在线观看|
女孩要大鸡巴干免费短视频|
囯产伦精品一区二区三区视频|
99国产精品9999|
亚洲欧美在线视频91|
又粗又硬又黄又长又爽|
91精品国产情侣高潮对白会所|
我想看最真实最刺激的大鸡巴日逼
|
超碰97在线免费观看了|
久久综合久久综合鬼色|
五月香蕉人人香蕉五婷
|
免费看瑟瑟视频的软件|
国产一级片久久免费看同|
欧美人与禽zozo性伦|
国产精品国产三级精品|
一二三区日本亚洲视频|
久久久精品一卡二卡|
清纯唯美激情自拍偷拍少妇|
人人妻人人澡人人爽人人在线观看|
狠狠躁日日躁夜夜躁2020|
又大又爽又粗又黄少妇毛片|
中文字幕,久久爽一区|
人妻熟妇av一区二区|
91久久精品免费视频|
欧美美女免费在线视频|
久久久久久九九九九热|
大鸡巴操出淫水视频|
在线观看69式视频|
宅男噜噜噜666国产免费|
又大又爽又粗又黄少妇毛片|
人妻中文字幕久久不卡|
国产资源在线中文字幕|
香港午夜一级大片在线播放|
欧美高清视频一二三区|
久久久久久久久久婷婷婷婷婷婷|
free美女女同性|
亚洲少妇色小说综合|
亚洲乱熟女一区二区三区三州|
欧美一级中文字幕免费在线|
自拍偷拍99亚洲视频|
欧洲美女b毛裸体日韩影院|
变态调教一区二区三区男同
|
精品四川乱子伦视频国产|
天天日天天色天天射天天色综合|
成人动漫精品一区三区|
欧美日韩激情第一站|
91精品国产自产在线观看,|
亚洲永久精品一区二区三区|
人人爽人人搞人人爽人人搞|
天天操天天操天天操天天操夜夜操|
yellow在线亚洲精品一区|
特级黄色搞逼的亚洲的|
精品熟妇视频在线观看|
午夜在线成人免费视频|
美女视频在线欧美日韩|
人妻诱惑久久中文字幕在线视频|
国产麻豆精品在线观看免费|
国产又粗又长又大又呻吟|
天天做天天摸天天爽|
超碰97在线免费观看了|
91精品国综合久久久蜜臀九色|
久久精品天堂一区二区|
国产又粗又黄又猛视频|
7777久久亚洲中文字幕密|
又黄又猛又大又长又硬又久免费|
久久久久久91精品人妻|
超碰在线夫妻自拍51|
日韩精品无码专区蜜桃|
亚洲成a人7777在线播放|
欧美美女免费在线视频|
亚洲一区高清资源在线|
亚洲高清资源在线观看|
国产a久久久久久久|
欧美中文字幕一区二区|
日本久久久久久人妻|
五月天久久丁香综合国产一区|
9l熟女自拍蝌蚪9l|
久久久久久久久久婷婷婷婷婷婷
|
超碰97在线视频观看|
人妻少妇啊灬啊用力快|
五月香蕉人人香蕉五婷|
鲁大师在线观看视频免费高清版|
日本久久久久久人妻|
国产一区二区三区偷拍视频|
亚洲熟妇色xxxxx欧美|
精品视频一区二区在线观看免费|
天天舔天天日天天干天天操天天射|
人人妻人人澡人人爽精品日本
|
91精品人人妻人人做人人爽|
精品在线视频播放你懂的|
青娱乐在线分类视频|
日韩专区欧美精品三区二|
牛牛精品大机巴男人日B片|
又大又爽又粗又黄少妇毛片|
内射欧美少妇小骚逼里面|
91免费在线免费观看|
www日韩精品在线|
又粗又硬又黄又长又爽|
亚洲中文字幕无码av一区|
午夜精品久久秘?18免费观看|
亚洲欧美偷拍综合图片|
黄页网站大全在线看免费视频
|
91小视频在线免费看|
精品无人伦一区二区三区|
亚洲午夜精品久久久中文影院
|
婷婷激情五月俺也去|
中文字幕亚洲欧美加勒比|
亚洲第一精品国产精品|
97人妻人人澡人人搡|
亚洲中文字幕无码av一区|
成人av精品在线观看|
久碰人妻人妻人妻人妻人调教女王
|
中文字幕一区二区免费视频|
亚洲avav在线天堂|